|

俁憡僐儞僾儗僢僒偺儌乕僞婲摦偡傞僀儞僶乕僞乕両
仸儅僀僐儞宆僀儞僶乕僞乕
2005-09-02
|
|
仸俙俠俁憡桿摫儌乕僞乕偺幚尡
|
丂擾椦嬈偱嶌嬈偺彫壆偑嶳偺忋偺曽偵愝抲偝傟偰偄傞応崌側偳偺揹尮偼丄扨憡揹尮偑懡偔偁傝丄俁憡揹尮偑昁梫側僐儞僾儗僢僒乕偑巊梡偱偒傑偣傫丅
僐儞僾儗僢僒乕偼揹帴愙怗婍偲儌乕僞乕偲埑椡僗僀僢僠偱峔惉偝傟偰偍傝丄僀儞僶乕僞乕偱嬱摦偱偒傑偡丅
壓婰偵偮偄偰拲堄偟傑偡丅
侾乯扨憡擖椡偵偼丄俁憡儌乕僞乕偺掕奿揹棳抣偺栺俀攞偑棳傟傑偡丅
俀乯儌乕僞乕婲摦帪偵偼丄掕奿揹棳抣偺栺俇攞偑棳傟傑偡丅
俁乯儌乕僞乕揹棳攇宍偼丄惓尫攇偵偟傑偡丅
埲忋偺偙偲傛傝儌乕僞乕偼俆攏椡傑偱偱丄惂屼偼惓尫攇PWM曽幃偲側傝傑偡丅
|
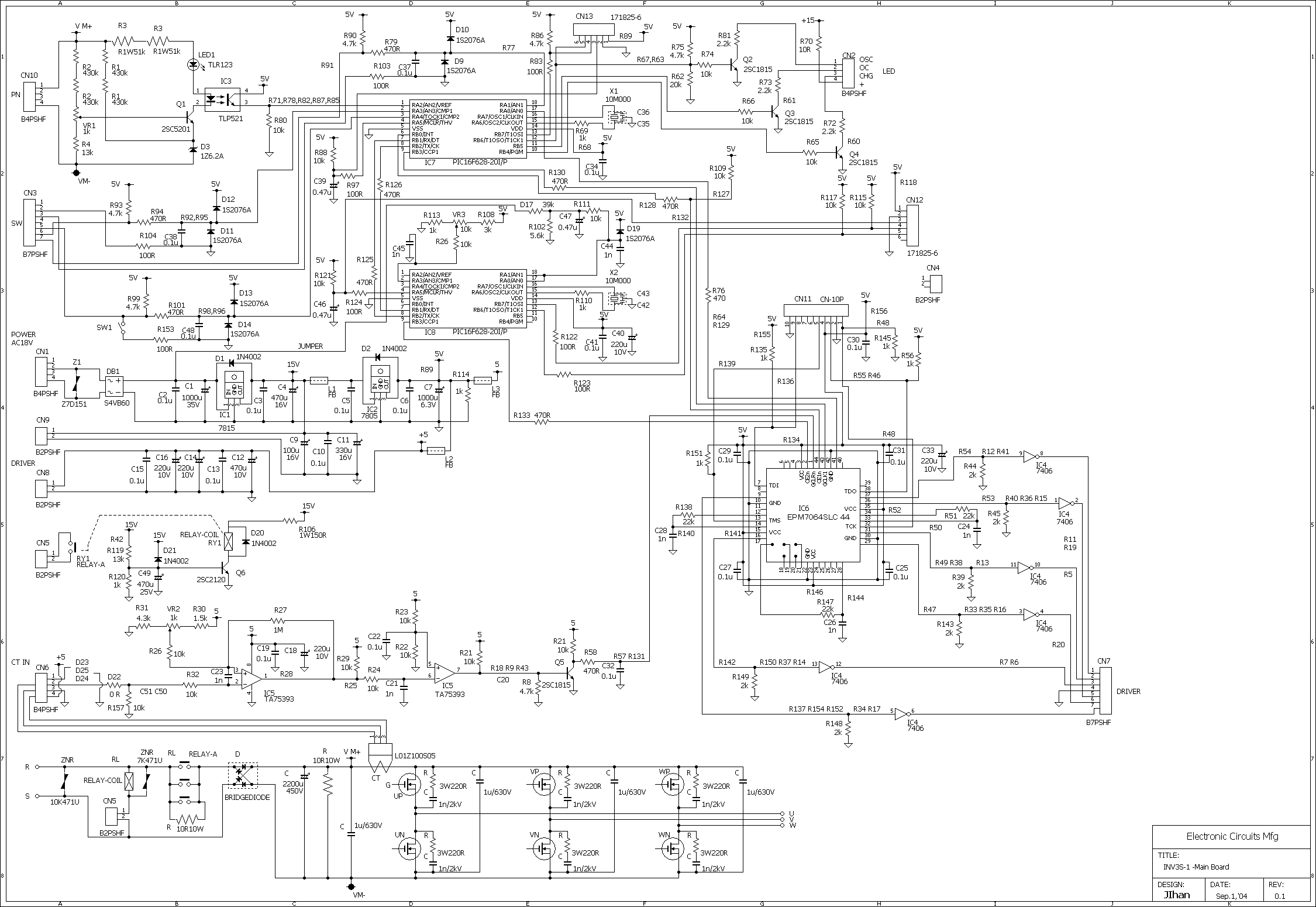
恾侾丏僽儘僢僋恾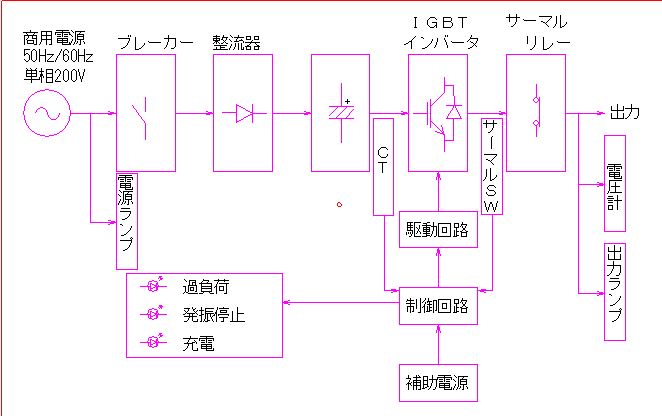
| |
仸巇條
|
丂崱夞惢嶌偵巊梡偡傞俠俿偼丄俴侽侾倅侾侽侽俽侽俆偱偡丅掕奿揹棳偼丄侾侽侽俙俿偱偡丅掕奿弌椡揹埑偼丄俀丏俆倁亄侾丏俆倁偱偡丅
抁棈曐岇傪俈侽俙偲偟偰丄儃儕儏乕儉偱俁丏俆俋倁偵挷惍偟傑偡丅
俬俧俛俿偺巇條傛傝抁棈曐岇墳摎帪娫偼侾侽兪俽偲偟傑偡丅
|
巇條彂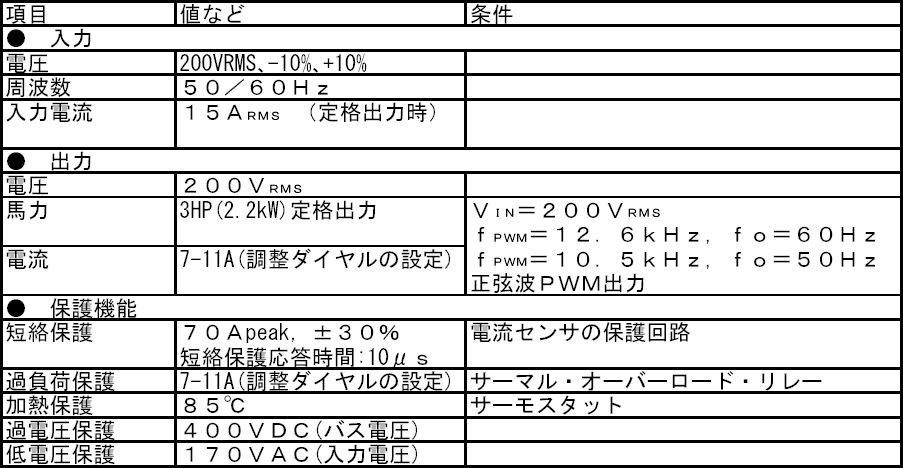
| |
仸僴乕僪僂僃傾
|
丂幚尡偡傞僀儞僶乕僞偺僽儘僢僋恾傪恾侾偵帵偟傑偡丅
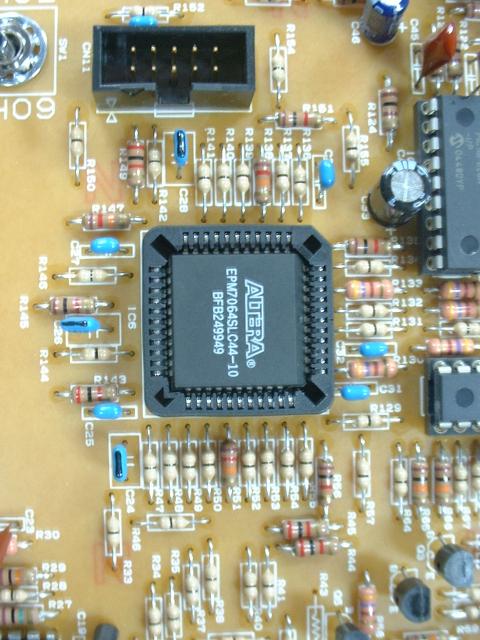
丂恾俀偵僀儞僶乕僞偺僞僀儈儞僌丒僐儞僩儘乕儖晹傪帵偟傑偡丅
僞僀儈儞僌丒僐儞僩儘乕儖夞楬偼丄忋壓偺俬俧俛俿偺俷俶乛俷俥俥偑愗傝懼傢傞嵺偵棳傟傞娧捠揹棳傪偱偒傞偩偗彫偝偔偟傑偡丅偙偺夞楬偺帪掕悢傪戝偒偔偡傟偽娧捠揹棳偼彫偝偔側傝傑偡丅奜晹俠俼傪俼亖侾俀倠兌丄俠亖係俈侽倫俥偲偡傞偲丄忋壓栺俇兪俽偺抶墑宍偵側傝傑偡丅
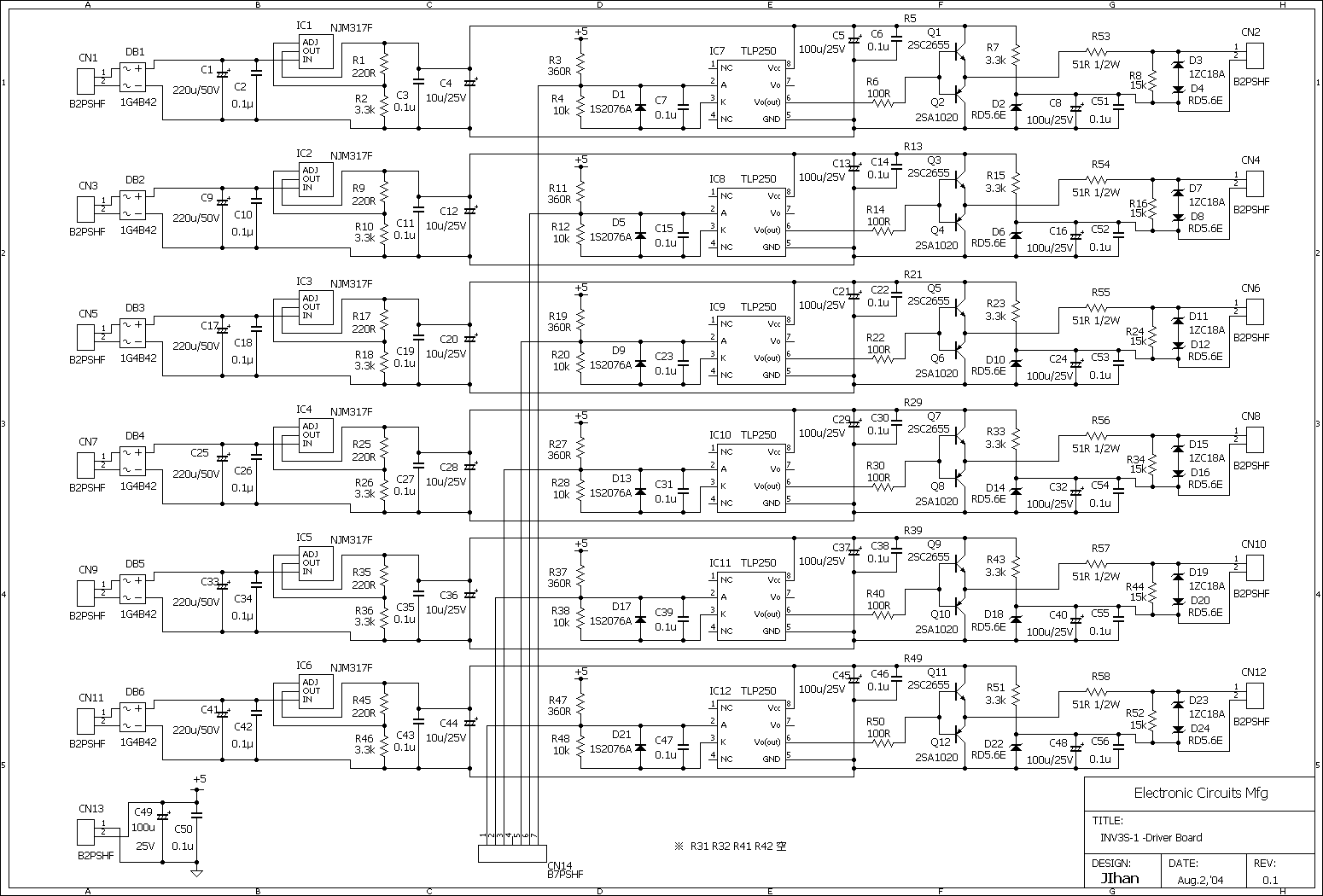
丂恾俁偵惢嶌偟偨僀儞僶乕僞偺僗僫僶夞楬傪帵偟傑偡丅
嘆 僗僀僢僠儞僌慺巕偑俷俥俥偟偨偲偒偵攝慄偺僀儞僟僋僞儞僗惉暘偵拁愊偝傟偨僄僱儖僊乕偵傛偭偰丄僗僷僀僋揹埑偑敪惗偟傑偡丅奺儌僕儏乕儖偵侾丏俆兪俥偺僼傿儖儉宯偺崅廃攇梡僐儞僨儞僒傪愙懕偟丄崅廃攇揹棳傪僶僀僷僗偝偣傞丅俠俼偺捈楍夞楬傪愙懕偟丄儕儞僊儞僌傪彍嫀偟傑偡丅
嘇 庡夞楬揹尮乮揹夝僐儞僨儞僒乯偲慺巕娫偼丄僀儞僟僋僞儞僗傪尭傜偡偨傔俲俬倁俆丏俆倣噓傪暯峴偵攝慄偡傞丅奺儌僕儏乕儖娫偼丄侽丏係噊偺摵斅傪廳偹崌傢偣暆係俇噊偱攝慄偡傞丅乮暵夞楬偺柺愊彫偝偔乯
嘊 僪儔僀僽夞楬晹偲僷儚乕夞楬晹偑暿側偺偱丄僲僀僘偵傛傞岆摦嶌傪杊巭偡傞偨傔偵丄慄嵽傪僣僀僗僩忬偵偟丄僎乕僩掞峈偲曐岇梡偺僣僃僫丒僟僀僆乕僪偼僎乕僩偺偡偖嬤偔偵幚憰偡傞丅僪儔僀僽夞楬偺揹尮傛傝僐儗僋僞偵愭偵揹埑偑壛傢偭偨偲偒偺懳嶔偲偟偰丄僎乕僩丒僄儈僢僞娫偵掞峈傪擖傟偰丄僎乕僩偑僴僀丒僀儞僺乕僟儞僗偵側傜側偄傛偆偵偡傞丅
|
恾俀丏僞僀儈儞僌丒僐儞僩儘乕儖晹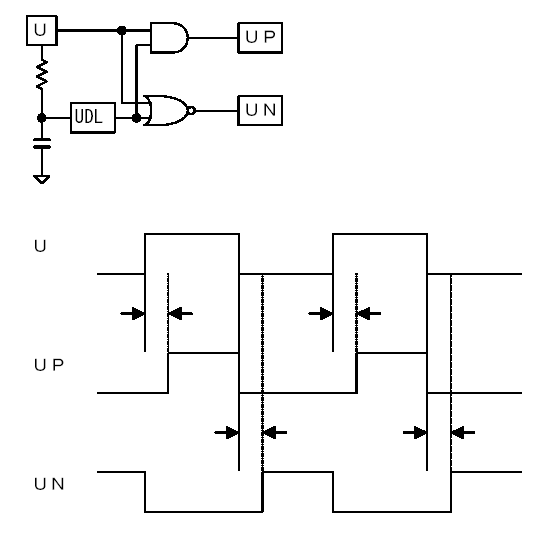
恾俁丏僗僫僶夞楬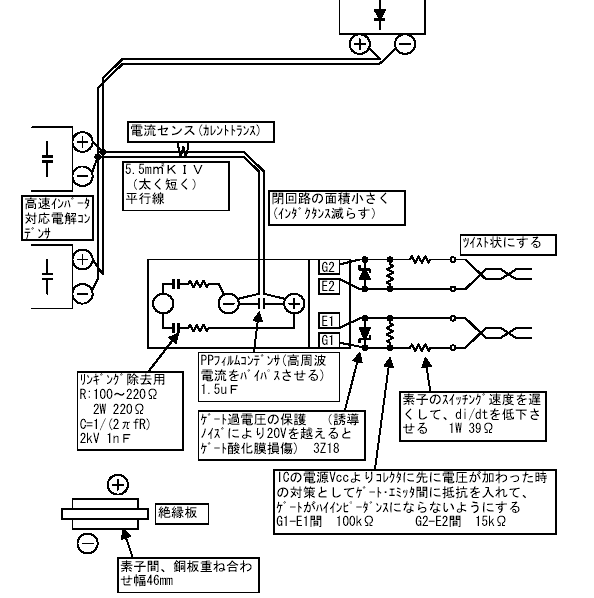
婎斅偺夞楬恾
|
|
|
揹尮搳擖帪丄庡夞楬揹尮乮揹夝僐儞僨儞僒乯傪廩揹偡傞偨傔丄栺侾倱抶傟偰塣揮偟傑偡丅
仩丂曐岇夞楬
夁揹埑曐岇夞楬乮俷倁乯
擖椡揹埑偑崅偔擖椡偟偨傝丄戝偒側僒乕僕揹埑偑敪惗偟偨偲偒専弌偟傑偡丅夞楬掕悢偱偼丄擖椡揹埑偑俀俁俇倁乣俀俆侾倁偺斖埻偱夁揹埑偺専弌偑壜擻偱偡丅
仩丂俹俴俢
儅僀僐儞傛傝夞揮懍搙偲弌椡揹埑偺挷惍偺敪怳怣崋偲塣揮乛掆巭怣崋偲丄僪儔僀僶俬俠傛傝夁揹棳怣崋偵婎偯偔俇偮偺庡僗僀僢僠偺嬱摦僷儖僗傪惗惉偡傞丅
嘆 夞揮懍搙挷惍僋儘僢僋丂丗f_carrer
倖丗儌乕僞揹棳偺廃攇悢
倖_carrer丗夞揮懍搙挷惍僋儘僢僋偺廃攇悢
侾廃婜侾俀侽僗僥僢僾
f_carrer亖倖亊侾俀侽乵俫倸乶
嘇 弌椡揹埑壜曄僋儘僢僋丂丗f_vf
夞揮懍搙挷惍僋儘僢僋偺廃攇悢偺栺俁侽攞埲忋乮僇僂儞僞俆價僢僩乯
偙偺廃攇悢偑崅偔側傞傎偳俹倂俵丂俷俶暆偑抁偔側傝丄弌椡揹埑偑壓偑傞丅
婲摦曗彆儃僞儞偺応崌丄栺侾俀侽倁偵愝掕偟偰偄傑偡丅
f_vf=f_carrer亊倠
k:栺俁侽
嘊 塣揮乛掆巭怣崋
俷俶乮俴乯丗塣揮
俷俥俥乮俫乯丗俁僗僥乕僩弌椡
嘋 夁揹棳怣崋
僪儔僀僶俬俠偐傜偺夁揹棳怣崋傪儔僢僠偟偰丄俹倂俵弌椡傪俷俥俥偝偣傑偡丅儔僢僠偺夝彍偼揹尮偺嵞搳擖偱俼俤俽俤俿偲偟偰偄傑偡丅夁揹棳怣崋傪儅僀僐儞偵弌椡偟傑偡丅
|
|
仸僜僼僩僂僃傾
|
丂夞揮懍搙偲弌椡揹埑偺挷惍偵敪怳夞楬傪俠俹俴俢偵弌椡偡傞丅敪怳巕偲偟偰丄侾侽俵俫倸偺僙儔儘僢僋傪巊偭偨応崌丄
俆俋丏俀乛俆侽丏侾俫倸偲側傝丄俋丏俀侾俇俵俫倸偺悈徎偱偼俇侽乛俆侽俫倸偲側傞丅
丂敪怳掆巭丄夁晧壸丄廩揹偺昞帵俴俤俢傪摦嶌偡傞丅
丂婎斅忋偺俆侽乛俇侽俫倸愗傝懼偊俽倂偲丄婲摦曗彆儃僞儞丄僒乕儅儖傪擖椡偟丄敪怳偲塣揮乛掆巭怣崋傪俠俹俴俢偵弌椡偡傞丅
撪晹儔僢僠
俢儔僢僠偺惂屼偵偼丄僋儘僢僋偺戙傢傝偵僀僱乕僽儖怣崋傪巊偄傑偡丅僀僱乕僽儖丒儔僀儞偑乭俫乭偺偲偒偼丄
偙偺儔僢僠偼俢擖椡傪撉傒崬傒丄乭俴乭偺偲偒偼帺暘帺恎傪撉傒崬傫偱僨乕僞傪曐帩偟傑偡丅
僄僢僕丒僩儕僈宆偺俢儔僢僠偺夞楬偼丄奜晹僋儘僢僋偑俴偐傜俫偵愗傝懼傢偭偨偲偙傠偱丄
侾僔僗僥儉丒僋儘僢僋暘偺僀僱乕僽儖怣崋傪弌偟傑偡丅偮傑傝旝暘夞楬偱偡丅偙傟傪僀僱乕僽儖丒儔僀儞偵偮側偘偽丄
棫偪忋偑傝偱摦嶌偡傞俢儔僢僠偲偟偰摥偒傑偡丅
|
婎斅
| |
仸幚尡寢壥
|
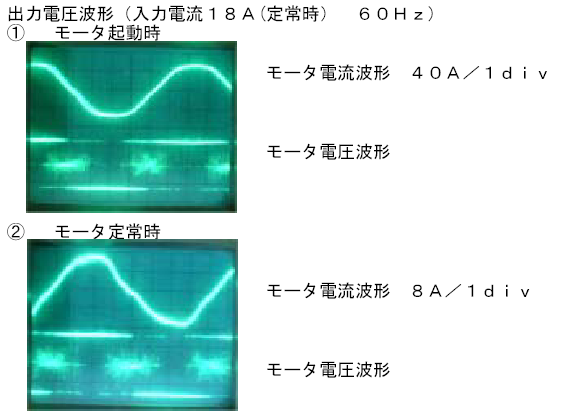
揹埑攇宍偼丄嬮宍攇偱丄揹棳攇宍偼儌乕僞乕偺僀儞僟僋僞偵傛偭偰暯妸偝傟偰惓尫攇忬偵側偭偰偄傑偡丅
儌乕僞乕偼儘僢僋偟側偄偱丄夞揮偟傑偡丅
|
幨恀丂揹埑揹棳攇宍
| |
仸儕僜乕僗
|
|
嶲峫暥專丗俹俬俠侾俇俥俇係俉俙
ASIC偺榑棟夞楬愝寁
|
|
{kind=link}
{kind=link}